近日,我院杨旭教授团队在土木、交通领域国际顶级期刊《Automation in Construction》上发表研究论文“Vision-guided robot for automated pixel-level pavement crack sealing”(视觉引导机器人用于自动像素级路面裂缝灌缝修复)。该研究得到了国家重点研发计划和国家自然科学基金的资助。我校博士生张建奇为论文的第一作者,杨旭教授为论文通讯作者。
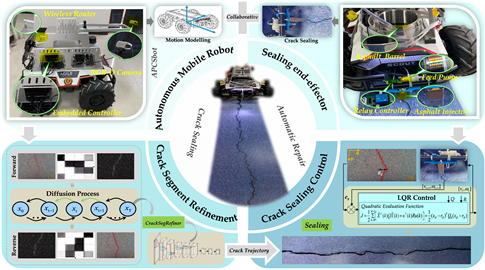
路面裂缝自动化灌缝在道路养护中扮演着至关重要的角色。然而,在提升裂缝分割和灌缝控制精度方面仍然存在一些挑战。本研究提出了一种自动化路面裂缝灌缝机器人(APCSbot),该机器人采用了裂缝分割细化网络(CrackSegRefiner)和裂缝灌缝控制器(LQR)。在自建(S2T-Crack)数据集上进行的大量实验验证了 APCSbot 的有效性,得到了 84.48% 的分割精度和 79.28% 的平均交并比(mIoU)。此外,系统在处理非连续性裂缝时显示出 6.22 mm 的灌缝误差和 0.0456 m/s 的速度,彰显了其在裂缝灌缝方面的卓越性和鲁棒性。
研究成果可广泛应用于高速公路、城市道路和机场跑道等基础设施的路面裂缝灌缝修复,为提升道路养护施工自动化智能化水平奠定研究基础。
《Automation in Construction》是土木和基础设施工程与施工自动化领域国际顶级期刊,中科院一区Top期刊,影响因子为10.3,在JCR土木工程领域182本期刊中排名第一。
全文链接:https://doi.org/10.1016/j.autcon.2024.105783